If you need assistance, please send an email to forum at 4hv dot org. To ensure your email is not marked as spam, please include the phrase "4hv help" in the subject line. You can also find assistance via IRC, at irc.shadowworld.net, room #hvcomm.
Support 4hv.org!
Donate:
4hv.org is hosted on a dedicated server. Unfortunately, this server costs and we rely on the help of site members to keep 4hv.org running. Please consider donating. We will place your name on the thanks list and you'll be helping to keep 4hv.org alive and free for everyone. Members whose names appear in red bold have donated recently. Green bold denotes those who have recently donated to keep the server carbon neutral.
Special Thanks To:
Aaron Holmes
Aaron Wheeler
Adam Horden
Alan Scrimgeour
Andre
Andrew Haynes
Anonymous000
asabase
Austin Weil
barney
Barry
Bert Hickman
Bill Kukowski
Blitzorn
Brandon Paradelas
Bruce Bowling
BubeeMike
Byong Park
Cesiumsponge
Chris F.
Chris Hooper
Corey Worthington
Derek Woodroffe
Dalus
Dan Strother
Daniel Davis
Daniel Uhrenholt
datasheetarchive
Dave Billington
Dave Marshall
David F.
Dennis Rogers
drelectrix
Dr. John Gudenas
Dr. Spark
E.TexasTesla
eastvoltresearch
Eirik Taylor
Erik Dyakov
Erlend^SE
Finn Hammer
Firebug24k
GalliumMan
Gary Peterson
George Slade
GhostNull
Gordon Mcknight
Graham Armitage
Grant
GreySoul
Henry H
IamSmooth
In memory of Leo Powning
Jacob Cash
James Howells
James Pawson
Jeff Greenfield
Jeff Thomas
Jesse Frost
Jim Mitchell
jlr134
Joe Mastroianni
John Forcina
John Oberg
John Willcutt
Jon Newcomb
klugesmith
Leslie Wright
Lutz Hoffman
Mads Barnkob
Martin King
Mats Karlsson
Matt Gibson
Matthew Guidry
mbd
Michael D'Angelo
Mikkel
mileswaldron
mister_rf
Neil Foster
Nick de Smith
Nick Soroka
nicklenorp
Nik
Norman Stanley
Patrick Coleman
Paul Brodie
Paul Jordan
Paul Montgomery
Ped
Peter Krogen
Peter Terren
PhilGood
Richard Feldman
Robert Bush
Royce Bailey
Scott Fusare
Scott Newman
smiffy
Stella
Steven Busic
Steve Conner
Steve Jones
Steve Ward
Sulaiman
Thomas Coyle
Thomas A. Wallace
Thomas W
Timo
Torch
Ulf Jonsson
vasil
Vaxian
vladi mazzilli
wastehl
Weston
William Kim
William N.
William Stehl
Wesley Venis
The aforementioned have contributed financially to the continuing triumph of 4hv.org. They are deserving of my most heartfelt thanks.
Registered Member #1062
Joined: Tue Oct 16 2007, 02:01AM
Location:
Posts: 1529
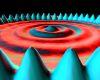
I was mulling over possibilities for vision based aerial navigation, and I came up with this. With a camera starting from above, a calibration sheet with multiple points is placed under it, with known distances. From this, The platform could calculate its height, as well as offset. Now, when the platform moves, it acquires new "significant" points, anything that can be tracked (simple as blob detection). From the previous calibrated sheet and the points remaining in view, it calculates the new distance for the new point. It continues in this web like fashion as it travels along.
Red is calibration points, blue dots are random blobs, and green is the calculated distance measurements. The black box is the cameras field of view.
The platforms tilt may be measurable, depending on the magnitude of the perspective distortion/ camera resolution. If not, its as simple as a stabilized camera platform. Thoughts?
Registered Member #2261
Joined: Mon Aug 03 2009, 01:19AM
Location: London, UK
Posts: 581
It's too complicated for my tiny mind to tell if the scheme is flawed, but it sounds convincing for an observer at constant height over a flat terrain with a constant viewing angle (attitude) and a non distorting camera lens.
If you move to a real world environment with a 3D terrain and varying observer altitude and attitude (e.g. model plane) I'd have to resort to models and tests and maybe even a bit of maths etc.. I suspect it might be vulnerable to 'optical illusions' (like us), confusing one sort of change with another, but some added intelligence could help filter out consequential poor decisions. For example, as the observer moves in an approximately known direction the relative positions of the points should move in a way that's consistent with the model it has formed of their locations (a bit like moving your head from side to side to clarify things when some odd perspective confuses your visual centres).
(Just thoughts - I could easily be completely wrong).
Registered Member #27
Joined: Fri Feb 03 2006, 02:20AM
Location: Hyperborea
Posts: 2058
There are a few things to note about this.
Errors will accumulate, soon the height and position will be very uncertain. Unless you fly in a special pattern you will get lots of conflicting information that has to be resolved. Finally it is not easy finding a reliable blob unless you litter the "unknown" area with blue bits of plastic.
You can greatly improve on these things if you have an accurate altimeter, then you can measure your ground speed accurately and from that true distance, that way errors wlil not accumulate.
Registered Member #1062
Joined: Tue Oct 16 2007, 02:01AM
Location:
Posts: 1529
If this worked out with a decent success rate, I was planning to use it as another source of data in a kalman filter, to further refine data. I was planning on using a SCP1000 barometric sensor for altitude.
Now that I think about it, I recall seeing a similar system that targeted houses, and worked "even with 80% cloud cover".
At the ground station, I have access to satellite imagery, so a simple image matching program could provide semi-accurate coordinates when GPS is not available.
Registered Member #2140
Joined: Tue May 26 2009, 09:16PM
Location:
Posts: 53
The sun affects everything similarly, so wouldn't a SAD algorithim still return the best match? The search area would be confined to a certain threshold based on time, last recorded speed, and last known GPS coordinate.
The Virtual Earth imagery has little shadows, but the USGS Urban Earth map has alot of shadows. Because in SAD, the order of the pixels in a block does not necessarily matter (a block matched with a block rotated would still match, if you were to alter the algorithm a bit), this would be a good map to compare to. I think the main problem here is the lack of up-to date imagery.
Registered Member #27
Joined: Fri Feb 03 2006, 02:20AM
Location: Hyperborea
Posts: 2058
If you rotate the block 90 degrees so that it is perfectly aligned again then it will work, yes. If not you have made a completely different algorithm that you are not telling us about.
This site is powered by e107, which is released under the GNU GPL License. All work on this site, except where otherwise noted, is licensed under a Creative Commons Attribution-ShareAlike 2.5 License. By submitting any information to this site, you agree that anything submitted will be so licensed. Please read our Disclaimer and Policies page for information on your rights and responsibilities regarding this site.


 Vision based navigation musings
Vision based navigation musings